







This AI Paper Has Moves: How Language Models Groove into Offline Reinforcement Learning with ‘LaMo’ Dance Steps and Few-Shot Learning
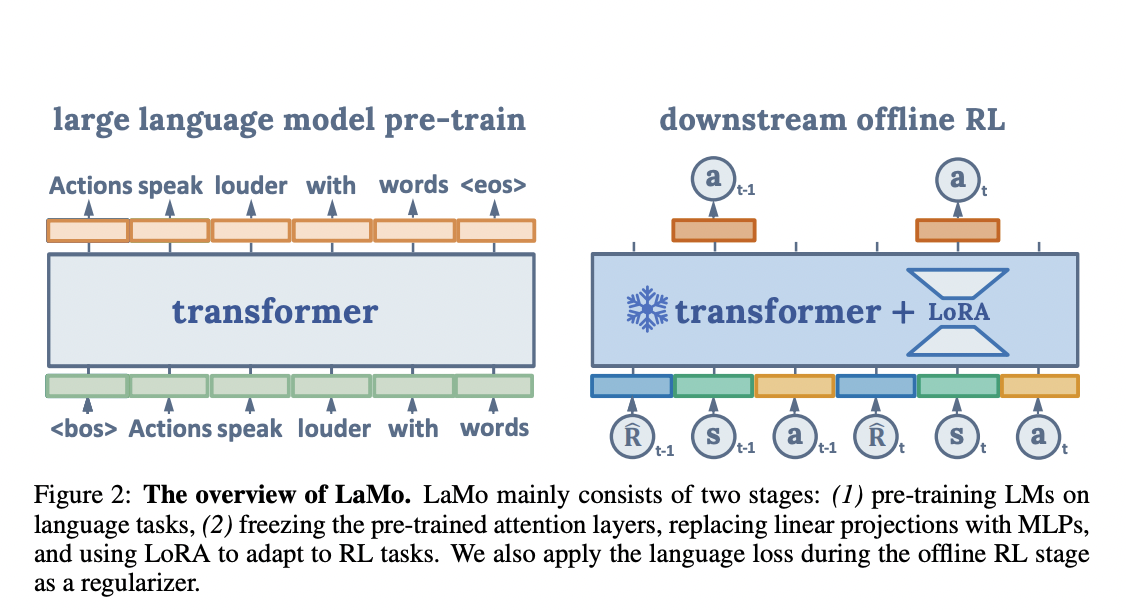


Researchers introduce Language Models for Motion Control (LaMo), a framework using Large Language Models (LLMs) for offline reinforcement learning. It leverages pre-trained LLMs to enhance RL policy learning, employing Decision Transformers (DT) initialized with LLMs and LoRA fine-tuning. LaMo outperforms existing methods in sparse-reward tasks and narrows the gap between value-based offline RL and decision transformers in dense-reward tasks, particularly excelling in scenarios with limited data samples.
Current research explores the synergy between transformers, particularly DT, and LLMs for decision-making in RL tasks. LLMs have previously shown promise in high-level task decomposition and policy generation. LaMo is a novel framework leveraging pre-trained LLMs for motion control tasks, surpassing existing methods in sparse-reward scenarios and narrowing the gap between value-based offline RL and decision transformers in dense-reward tasks. It builds upon prior work like Wiki-RL, aiming to better harness pre-trained LMs for offline RL.
The approach reframes RL as a conditional sequence modelling problem. LaMo outperforms existing methods by combining LLMs with DT and introduces innovations like LoRA fine-tuning, non-linear MLP projections, and auxiliary language loss. It excels in sparse-reward tasks and narrows the performance gap between value-based and DT-based methods in dense-reward scenarios.
The LaMo framework for offline Reinforcement Learning incorporates pre-trained LMs and DTs. It enhances representation learning with Multi-Layer Perceptrons and employs LoRA fine-tuning with an auxiliary language prediction loss to combine LMs’ knowledge effectively. Extensive experiments across various tasks and environments assess performance under varying data ratios, comparing it with strong RL baselines like CQL, IQL, TD3BC, BC, DT, and Wiki-RL.
The LaMo framework excels in sparse and dense-reward tasks, surpassing Decision Transformer and Wiki-RL. It outperforms several strong RL baselines, including CQL, IQL, TD3BC, BC, and DT, while avoiding overfitting—LaMo’s robust learning ability, especially with limited data, benefits from pre-trained LMs’ inductive bias. Evaluation of the D4RL benchmark and thorough ablation studies confirm the effectiveness of each component within the framework.
The study needs an in-depth exploration of higher-level representation learning techniques to enhance full fine-tuning’s generalizability. Computational constraints limit the examination of alternative approaches like joint training. The impact of varying pre-training qualities of LMs beyond comparing GPT-2, early-stopped pre-trained, and randomly shuffled pre-trained models still needs to be addressed. Specific numerical results and performance metrics are required to substantiate claims of state-of-the-art performance and baseline superiority.
In conclusion, the LaMo framework utilizes pre-trained LMs for motion control in offline RL, achieving superior performance in sparse-reward tasks compared to CQL, IQL, TD3BC, and DT. It narrows the performance gap between value-based and DT-based methods in dense-reward studies. LaMo excels in few-shot learning, thanks to the inductive bias from pre-trained LMs. While it acknowledges some limitations, including CQL’s competitiveness and the auxiliary language prediction loss, the study aims to inspire further exploration of larger LMs in offline RL.
Check out the Paper and Project. All Credit For This Research Goes To the Researchers on This Project. Also, don’t forget to join our 32k+ ML SubReddit, 40k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
We are also on Telegram and WhatsApp.
Sana Hassan, a consulting intern at Marktechpost and dual-degree student at IIT Madras, is passionate about applying technology and AI to address real-world challenges. With a keen interest in solving practical problems, he brings a fresh perspective to the intersection of AI and real-life solutions.
